- Generalized Robotic Grasping via Grasp-Pose Supervision, Object-Aware and Vision-Conditioned Policy LearningDeveloped a general-purpose grasping system that achieved 82% success on 2,000+ diverse objects using reinforcement learning algorithms and advanced tools like Isaac Sim, IsaacLab, and PyTorch. View details here!

- Ointment Care Robot for Limited Mobility UsersDeveloped an ointment application system for users with limited mobility using the Stretch RE2 Robot. Conducted user research and designed and implemented system end-to-end using Python, ROS, and JavaScript. View details here!

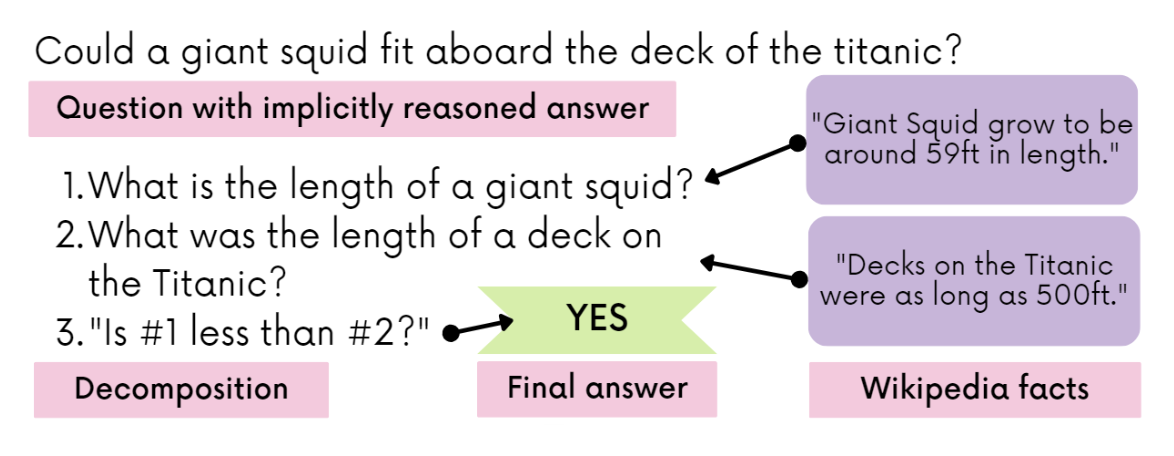
- StrategyQA: Implicit Reasoning in Large Language ModelsWorked with a small team to build a system that answers complex reasoning questions using ML/NLP skills, advanced AI models like BERT and T5, and tools like PyTorch and HuggingFace. View details here!